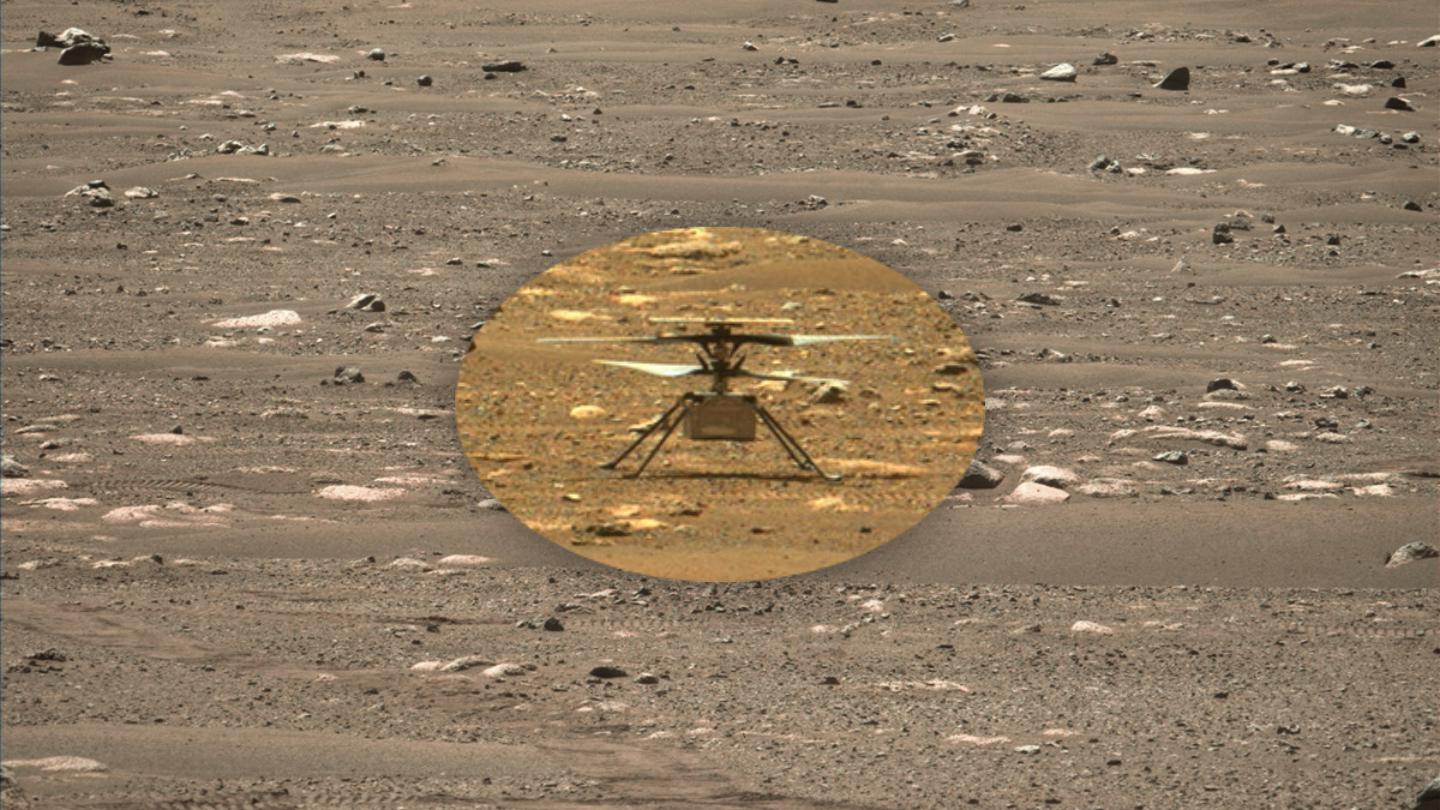
helicopter Hard Science The Mars helicopter’s scary sixth mission The helicopter’s sixth mission almost went down in disaster.
Hard Science The Mars helicopter’s scary sixth mission The helicopter’s sixth mission almost went down in disaster.