Researchers at Stanford University have developed a revolutionary type of robot by combining features of traditional and soft robotics, making it safe, sturdy, dynamic and able to change form.
Their invention, detailed in a paper published last month in Science Robotics, is a breakthrough in soft robotics that overcomes previous limitations. For one, the new creation can morph into new shapes and (once inflated) can move around without needing to be attached to an energy source.
“A significant limitation of most soft robots is that they have to be attached to a bulky air compressor or plugged into a wall, which prevents them from moving,” said Nathan Usevitch, a graduate student in mechanical engineering at Stanford, in a Stanford news release. “So, we wondered: What if we kept the same amount of air within the robot all the time?”
Isoperimetric robotics
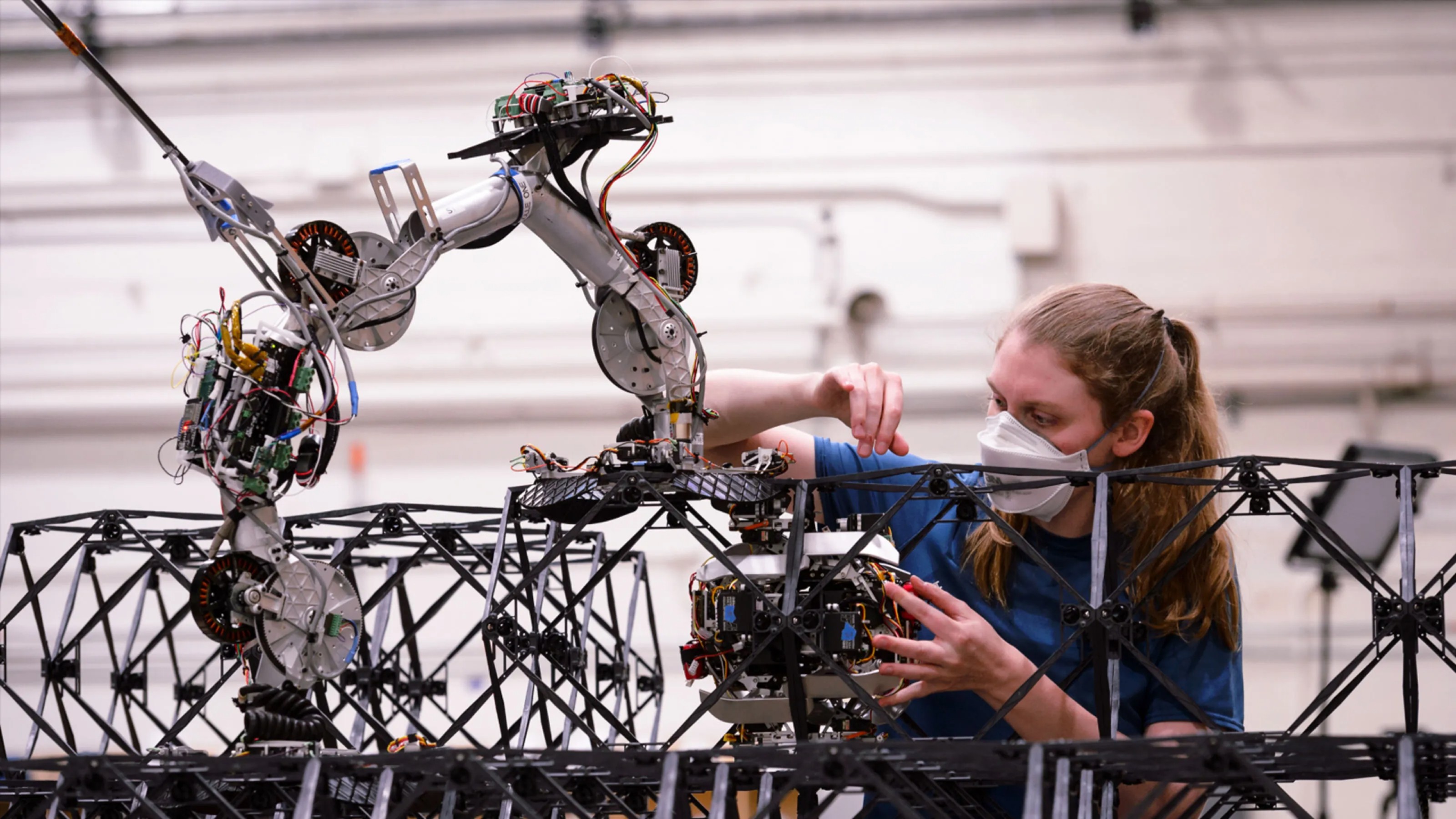
And so, an “isoperimetric robot” was born: a human-sized, human-safe soft robot that can change shape to grasp and manipulate objects as well as roll around in controllable directions. Flexible fabric tubes pumped full of air make up the robot’s limbs, while tiny motors move through the tubes to move the robot and change its shape.
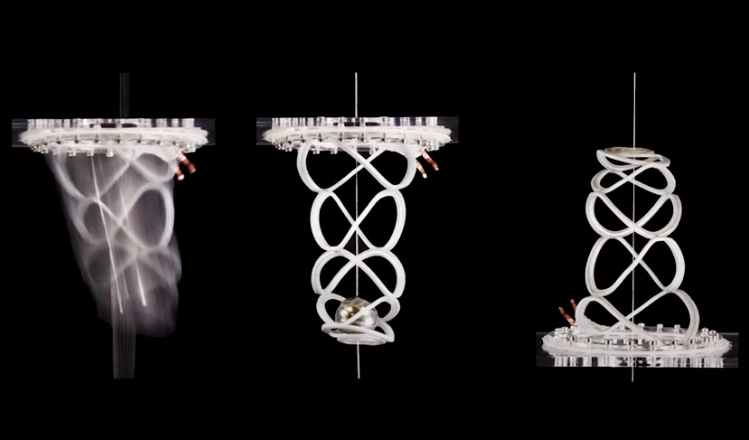
In its simplest version, the inflated tube runs through three small machines that cinch it into a triangle form. While one machine holds the two ends of the tube together, the other two move along the tube to morph the robot into new forms by moving its corners. The researchers call it an isoperimetric robot because while the shape changes, the total length of the edges (the amount of air inside the tubes) remains consistent. This new robot combines aspects from three other types of robots: soft robots (lightweight and malleable), truss robots (geometric forms that can shape-shift) and collective robots (small robots that work together), thus providing the benefits of each type while overcoming their limitations.
“We’re basically manipulating a soft structure with traditional motors,” said Sean Follmer, assistant professor of mechanical engineering and co-senior author of the paper.

By simply attaching several of those triangles together, the researchers are able to make a more complex version of the robot. They can make the robot perform certain actions by coordinating the movements of the differing motors. For example, picking up an object, like a ball, and moving it around. This kind of a task is more challenging for robots that use a gripper.
“A key understanding we developed was that to create motion with a large, soft pneumatic robot, you don’t actually need to pump air in and out,” said Elliot Hawkes, assistant professor of mechanical engineering at the University of California, Santa Barbara and co-senior author of the paper. “You can use the air you already have and just move it around with these simple motors; this method is more efficient and lets our robot move much more quickly.”
Possible applications
Soft robotics is a new field, and so it isn’t entirely clear how these kinds of creations will best be utilized. It’s been suggested that the safe texture and sturdy skeleton could make them applicable in homes and workplaces without the risk of injury. Soft robots could also be used in disaster response situations.
Some of the researchers are thinking even further out.
“This robot could be really useful for space exploration – especially because it can be transported in a small package and then operates untethered after it inflates,” said Zachary Hammond, a graduate student in mechanical engineering at Stanford and co-leading author of the paper. He thinks that the shape-shifting qualities of the robot could help it traverse the complex environments found on other planets. It could squeeze its way into snug spaces and splay out over obstacles, like an octopus.
Until then, the team is trying out different forms for the robot and exploring new types of soft robots.
“This research highlights the power of thinking about how to design and build robots in new ways,” said Allison Okamura, professor of mechanical engineering and co-author of the paper. “The creativity of robot design is expanding with this type of system and that’s something we’d really like to encourage in the robotics field.”
Read their research in Science Robotics.
The Power of Play